


La voiture autonome est elle un gigantesque flop ?
Du feedback...sinon rien !
Les cimetières sont remplis de sociétés qui n’ont pas compris les règles du jeu.
Ne pas confondre voiture sans chauffeur et voiture autonome.
Du Washington Post (21 janvier 2020):
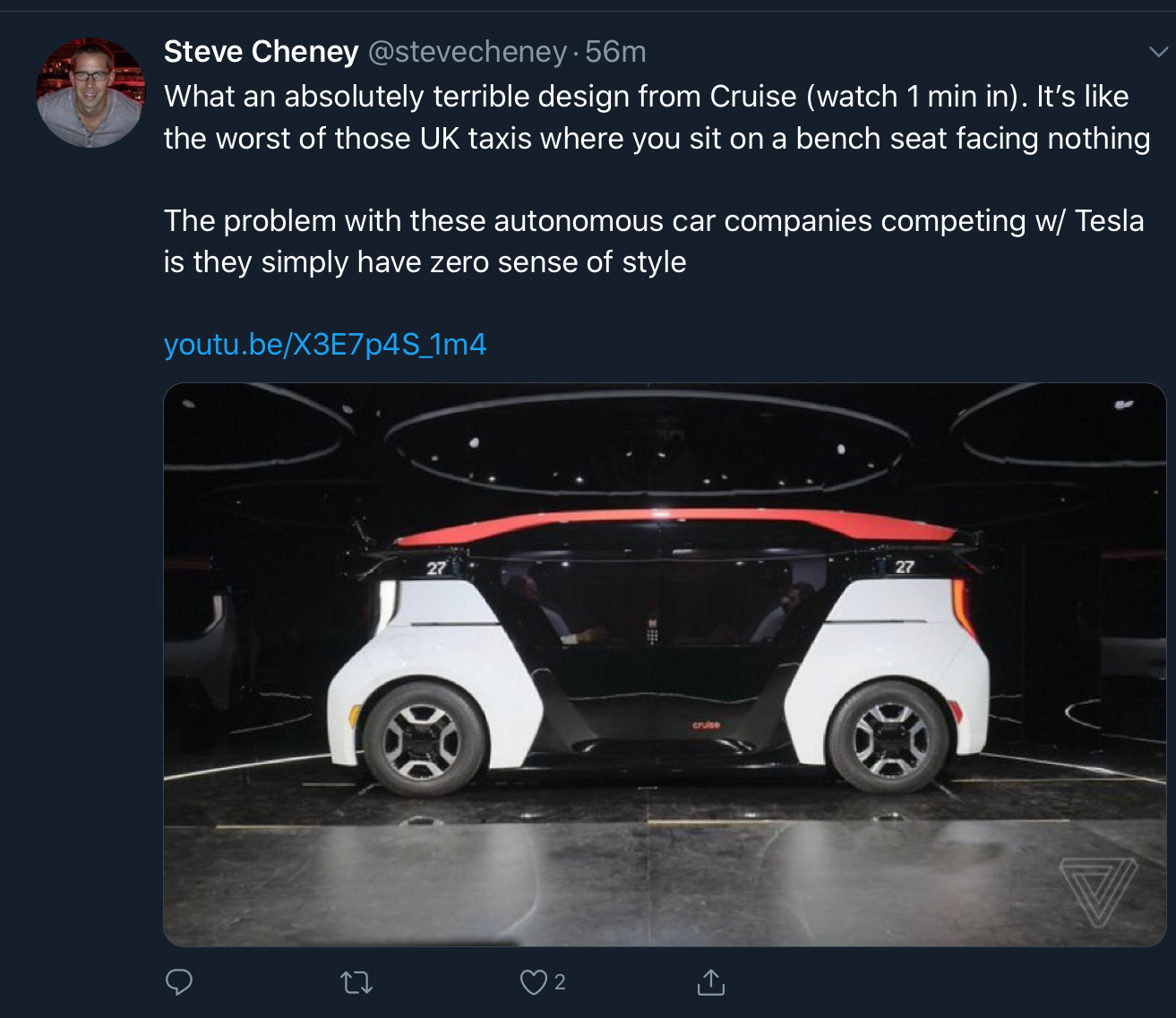
SAN FRANCISCO - Le constructeur automobile General Motors va tenter de tenir sa promesse de longue date de fournir un service de transport routier plus respectueux de l'environnement dans un véhicule peu orthodoxe conçu pour éliminer la nécessité de faire appel à des opérateurs humains pour transporter les gens dans les villes surpeuplées.
Le service encore en cours de développement par la filiale Cruise de GM s'appuiera sur un véhicule électrique de type "Origin" qui a été dévoilé mardi dernier à San Francisco en grande pompe. Il ressemble à un croisement entre une mini-fourgonnette et un véhicule utilitaire sportif, à une exception près : il n'aura ni volant ni freins. L'Origin pourra accueillir jusqu'à quatre passagers à la fois, et un client pourra le réserver par application, tout comme les gens peuvent déjà demander une voiture avec chauffeur chez Uber ou Lyft.
Deux données très simple permettent de comprendre le débat autour des voitures sans chauffeur (chiffres tirés des Etats-Unis):
Les américains passent 70 milliards d’heure par an derrière le volant, l’équivalent de 9 jours par personne! Imaginons que ce temps soit libéré pour travailler ou pour le loisir, l’impact sur le PNB serait impressionnant.
Il y a presque 5 millions de chauffeurs professionnels (poids lourds et véhicules légers ) aux États-Unis, ce qui pour un seul métier est inégalé (voir ici). On peut comprendre les fortes résistances corporatistes à la voiture sans chauffeur, d’autant que le blocage des routes est très efficace comme moyen de pression.
La technologie des voitures sans chauffeur est très différente des autres dans la mesure où il n’y a aucun feedback des utilisateurs qui permettrait de la faire progresser. Et la situation risque de durer: les pressions sont fortes pour mettre des bâtons dans les roues des voitures sans chauffeur afin de retarder leur adoption.
Technologie, feedback, adoption
Dans tous les domaines, le progrès est inséparable du feedback. Nous avons vu dans Le cinquième pouvoir que l’interactivité était le moteur d’un nouvel équilibre de l’information et donc du pouvoir avec des conséquences révolutionnaires sur l’organisation de la société. Tel est la puissance du feedback. Le feedback est à la base de l’apprentissage, sa démocratisation par l’internet nous rend beaucoup plus efficaces dans tous les domaines. Beaucoup ont du mal à comprendre le nouveau paradigme, l’hyper-croissance, les pieuvres de l’internet type Google qui sont sur 36 métiers à la fois, les valorisations à plus de $1 T, l’intelligence des jeunes générations. L’explication est la puissance du feedback qui accélère l’apprentissage. John Boyd, le pilote de chasse et stratège militaire a inventé en 1986 la théorie de la boucle OODA. Cette théorie postule que la guerre conventionnelle de moyens, très coûteuse, est dépassée par la guerre de vitesse basée sur le feedback. Les quatre phases du combat (aérien) de John Boyd se résument à: Observe, Orient, Decide, Act, enclenchées en boucle de plus en plus rapide pour désorienter l’ennemi. Cela donne ceci:
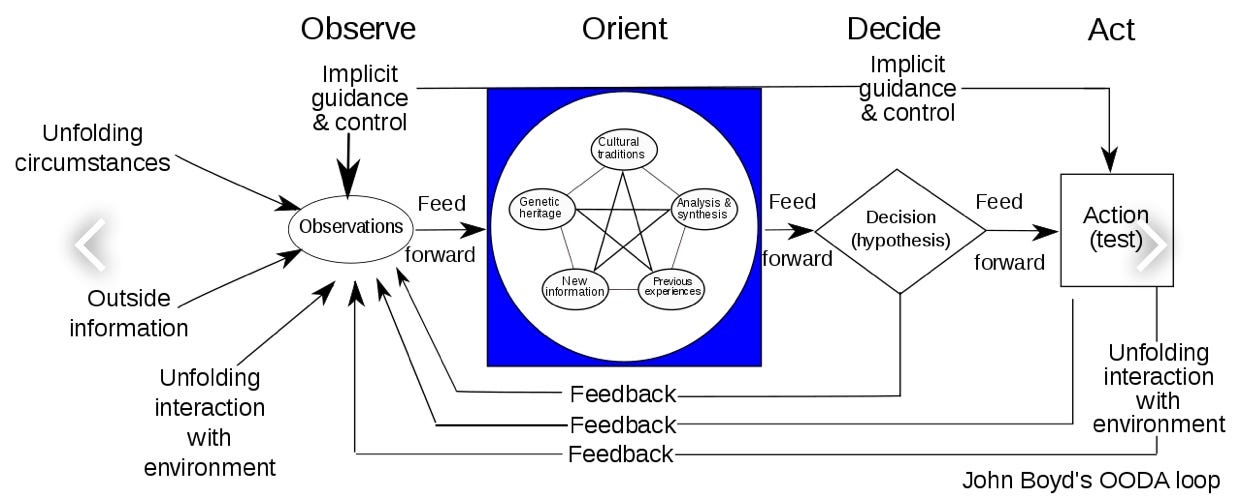
La rapidité de la boucle, de l’action au feedback puis du feedback à l’action (action…réaction!) est la clé de la victoire. La boucle OODA a été illustrée au cinéma dans la scène d’ouverture de Top Gun et a été utilisée sur le terrain lors des guerres d’Afghanistan et d’Irak, notamment. Elle est aussi utilisée en stratégie d’entreprise. Avec l’économie internet, le feedback change de tempo. Il devient quasi immédiat. Dans la société capitaliste traditionnelle, le principal mécanisme de feedback est la faillite, précédée de feedbacks intermédiaires (perte d’un client, d’un marché, etc.). Le feedback y est une variable discrète alors qu’elle y est continue dans l’économie internet. On change de dimension.
Et pourtant la voiture sans chauffeur échappe totalement à la chance du feedback, elle doit avancer à l’aveugle jusqu’à son adoption. Ce n’est pas du tout comme cela que les sociétés internet s’imposent: Amazon passe son temps à tester de nouvelles initiatives qu’il peut étendre agressivement en cas de feedback positif ou arrêter immédiatement (le Fire Phone), Apple ou Tesla modifient leur OS régulièrement avec une vision de la façon dont les clients les utilisent. Avec la voiture sans chauffeur, on est comme en régime communiste, on fabrique d’abord en espérant que cela va marcher et on crée le buzz comme le régime communiste crée la propagande:


Conduite sans chauffeur
Les contours du marché de la voiture sans chauffeur sont encore très flous. Il n’y a aucun processus itératif qui permettrait de cerner ce que les gens en demandent et de se positionner en vainqueur. Qui, en voyant le premier BlackBerry aurait pu prédire le succès de l'iPhone ? L’itération est la clé, demandez à Xerox, l’inventeur du premier PC et de la première interface graphique en 1970. Avec la voiture sans chauffeur, on n’a même pas le premier BlackBerry ! Cela ne facilite pas la tâche ! C’est pourquoi les investissements massifs réalisés par les sociétés qui visent le marché de la voiture sans chauffeurs doivent être regardés avec scepticisme:
Uber a dépensé $ 457 millions sur sa technologie de voitures sans chauffeur en 2018. Pourquoi se risquer sur un tel pari technologique à l’aveugle alors qu’Uber peut s’appuyer sur ses 100 millions de clients pour transférer ce risque à d’autres et adopter au final ce que ses clients préféreront ? Uber ne court aucun risque de se faire doubler par une société technologique qui aurait trouvé la recette magique. Les voitures sans chauffeur ne pourront être introduites d’un seul coup pour remplacer les chauffeurs Uber, l’investissement serait trop massif: $150 milliards minimum pour compenser les 3 millions de chauffeurs Uber, sans avoir les utilisateurs…
Waymo espère avoir une supériorité sur les données (culture Google) pour construire le système de pilotage infaillible. Mais comment avoir un feedback et faire évoluer le produit s’il n’est pas introduit. Les dépenses s’accumulent années après années. Waymo ne donne pas ses chiffres mais les inclut dans le segment “autres paris” d’Alphabet et représente le gros de ses pertes: -$2,7 milliards en 2017, -$3,4 milliards en 2018, -$2,8 milliards sur les 9 premiers mois 2019. La voiture qui sortira de cet effort massif de recherche sera très chère (comme l’ordinateur Xerox). Correspondra t-elle pour autant à la demande ? Waymo met en avant ses 20 millions de miles de conduite et ses 1500 utilisateurs actifs du service à Phœnix. Il n’y a cependant pas de feedback client possible car il y a toujours un chauffeur au volant.
General Motors a acheté Cruise Automation en 2016 et veut faire levier sur sa capacité à produire en masse pour tenter sa chance dans la voiture sans chauffeur. Sa technologie est top notch et a attiré d’autres investisseurs comme SoftBank et Honda. Les pertes s’accumulent alors qu’aucun service véritablement sans chauffeur n’est commercialisé et testé: plus de $1 milliard par an. Le problème de multinationales comme Alphabet ou GM est d’entreprendre des projets de masse, au potentiel énorme: ils appliquent la stratégie conventionnelle de la guerre de moyens, celle qui fait beaucoup de pertes. Sans feedback, on obtient une voiture de ce style:

De petits acteurs moins connus appliquent les principes de John Boyd et ont probablement plus de chance dans la compétition: Nuro est un cas intéressant. Cette start up fondée en 2016 par deux ancien de Waymo, a un objectif limité: faire rouler une voiture sans chauffeur et sans passagers pour la livraison du dernier km, à une vitesse limite de 40 km/heure. En réduisant singulièrement les risques d’accident et d’interactions hommes-machines, Nuro peut obtenir rapidement une license et commencer à commercialiser son véhicule. Nuro a passé une premier accord avec Kroger, un deuxième avec Domino’s Pizzas puis un troisième récemment avec Wal Mart qui vont lui permettre de progresser en terrain réel. Kroger a lancé le service à Scottsdale (Arizona) et à Houston (Texas), Domino’s Pizzas à Houston et Wal Mart le projette à Houston. La Californie vient de donner son accord en décembre pour la commercialisation de ce type de services. D’après The Verge (18 décembre 2019):
Les camions légers autonomes peuvent maintenant être utilisés à des fins commerciales sur les routes publiques de la Californie. Le département des véhicules automobiles de l'État a annoncé mardi la proposition, qui décrit un processus d'autorisation pour les entreprises souhaitant tester ou déployer des camions sans conducteur à des fins commerciales.
La nouvelle règle, qui a été proposée pour la première fois en avril 2019, ne s'applique qu'aux véhicules autonomes pesant moins de 10 000 livres. Cela signifie que seuls les camions des classes 1 et 2 - qui comprennent les mini-fourgonnettes, les camionnettes, les fourgonnettes utilitaires et les camionnettes à plateau - peuvent recevoir des permis pour les essais et les livraisons commerciales en vertu de la règle.
Le véhicule imaginé par Niro n’est pas glamour mais il est vraiment conçu sans chauffeur (seule une surveillance éloignée est obligatoire). Le système peut être testé commercialement, étendre ses autorisations à d’autres états, à d’autres fonctionnalités, peut-être à d’autres types de véhicules. La loi du marché en décidera, pas un soviet suprême…

D’autres initiatives sont prometteuses comme Voyage qui vise les communautés de retraités. Ces sociétés essaient d’éviter le syndrome Xerox qui a sorti son premier (et dernier) ordinateur en 1981 au prix de $16 000 ($45 000 en dollars d’aujourd’hui), après 8 ans de développement en interne.
Voitures assistées/autonomes
Si le marché de la voiture sans chauffeur paraît encore bien nébuleux, les fortes pressions sur la réglementation aidant, il en va différemment du marché des systèmes de conduites autonomes, celui où il y a toujours un chauffeur derrière le volant. On se focalise trop sur l’objectif final qu’on assimile à tord à la résolution d’un problème technologique (l’autonomie de niveau 5)…et pas assez sur l’intermédiaire où les places se prennent aujourd’hui. Le marché des systèmes de conduite autonome est réel: 30 à 40% des détenteurs de Tesla ont acheté l’Auto Pilot d’après Forbes. Sur la base de 400 000 véhicules, cela fait 140 000 autopilots à un tarif de $7 000, soit un chiffre d’affaires annuel de $1 milliard. Le système de conduite assistée de GM, Super Cruise, est vendu à $5 600 pour l’instant sur les Cadillac CT6 et CT4 mais l’offre va être étendue à tout GM. D’autres sociétés automobiles proposent aussi l’option de pilotage plus ou mois autonome (Nissan, BMW, etc.). Mobileye, le leader des puces autonomes a livré déjà 54 millions de voitures. Un système de pilotage autonome repose à minima sur des capteurs, du logiciel et des puces. Si l’on rajoute la cartographie et la voiture, on obtient une chaîne de valeur complète. Qui va prendre le pouvoir ?
La conservation des profits attractifs
La loi de conservation des profits attractifs, énoncée par Clayton Christensens (un grand penseur de l’innovation décédé la semaine dernière) est bien utile dans ce type d’analyse. Elle stipule que dans une chaîne de production, le profit se concentre sur la tâche qui n’est pas suffisamment bien remplie aux yeux des consommateurs, le reste des tâches étant modularisées. Elle stipule également que quand la tâche qui concentrait le profit devient suffisamment remplie aux yeux du consommateur, le profit se déplace à un nouvel endroit de la chaîne où la satisfaction du consommateur est insuffisante. Cette loi est particulièrement adaptée aux secteurs qui évoluent vite comme la technologie. Dans l’industrie du PC, pendant des années, le problème était le cerveau de l’ordinateur (Microsoft+ Intel), le reste des pièces étant relativement facile à faire et collant à la demande (disque dur, unité centrale, etc.). Puis quand la demande s’est déplacée sur le smartphone, ce qui ne collait pas était l’expérience utilisateur nécessitant une intégration de toutes les pièces et software dans un petit espace, le cerveau était amplement suffisant, d’où Apple. Le corollaire de cette loi est l’intégration de toutes les pièces nécessaires pour accomplir la tâche qui ne satisfait pas la demande. Pourquoi ? Tout simplement parce que ces pièces doivent être améliorées en fonction des feedbacks utilisateurs et que l’intégration facilite la vitesse de réponse au feedback. On en revient à l’avantage de la boucle OODA: elle détermine les gagnants. Les parties qui sont suffisantes peuvent être sous-traitées et évoluer au rythme des avancées du sous-traitant. Quelles sont les pièces insuffisantes dans les systèmes de conduite autonome ?
Modularité et intégration
La réponse est… toutes les parties. Rien ne fonctionne encore vraiment dans le système: il se déconnecte par temps de brouillard quand on aurait le plus besoin de lui, il couine tout le temps pour vous rappeler à votre devoir de vigilance, il est inadéquat en ville. Même le Smart Summon de Tesla a de sérieuses limites: pour fonctionner il faut être à moins de 60 m avec la voiture en ligne de mire. L’ensemble laisse à désirer et doit être intégré pour maximiser les feedbacks tant internes qu’externes:
les cartes HD sont insuffisantes et sont progressivement alimentées par des voitures équipées de LIDAR (radars lasers) ou équivalents qui sillonnent les routes en permanence pour faire des cartes en temps quasi-réel. Ces cartes permettent de positionner la voiture dans son environnement et de compléter le travail des capteurs (voir plus loin et mieux)
les capteurs sont de trois types: caméras, radars, LIDAR. Les caméras jouent le rôle de l’œil humain (2 D), les LIDAR ajoutent la 3 D, enfin les radars défient le brouillard et la pluie. La combinaison des 3 est un must très onéreux. Il faut trouver des solutions ingénieuses pour contourner le problème du prix (surtout des LIDAR).
les puces ont un travail énorme de calcul et de redondance à effectuer. Elles sont regroupées dans des SOC, incluant CPU, GPU, accélérateurs, etc. Leur puissance est multipliée par 10 tous les trois ans en moyenne, avec une consommation énergétique stable, ce qui permet de rajouter des capteurs, traiter plus d’information.
les logiciels incluant les données pour les entraîner interprètent le travail des capteurs et enclenchent les actions nécessaires pour conduire la voiture, éviter les obstacles, prévenir le conducteur, etc. Les actions entreprises par les logiciels sont encore très limitées. La partie logicielle doit suivre l’amélioration de la puissance. C’est ce qui permettra de passer du niveau 2 de conduite autonome actuel au niveau 5.
Finalement, le seul élément modulaire dans cette chaîne de production est la voiture (sauf pour Tesla), elle même, suffisante aux yeux du consommateur …au grand dam des constructeurs. Elle est elle même dans la plupart des cas composée de parties modulaires, issues de plus d’un siècle d’évolution. D’après la loi de Clayton Christensen, les profits attractifs se font sur la partie intégrée, pas sur la ou les parties modulaires.
Le dilemme des constructeurs traditionnels
Les constructeurs ont tendance à vouloir différencier leurs modèles par un système de conduite autonome propriétaire. Cela signifie qu’ils considèrent le tout comme intégré: leur métier est de vendre des voitures, pas des systèmes de conduite autonome. L’erreur conceptuelle est de ne pas reconnaître que l’intégration totale n’apporte rien, alourdit le produit et le met en désavantage, quand une partie est modulaire, suffisante et peut se brancher à la partie intégrée en plug and play. Le risque est l’abandon de la partie à plus ou moins longue échéance, par manque d’économies d’échelle avec des pertes à la clé. La seule exception est Tesla car ses modèles sont totalement intégrés, ce qui fait sens, la voiture électrique étant à ses débuts. Dès lors, le système de conduite autonome doit s’adapter aux spécificités de ses modèles et à leurs contraintes: imbrication du système dans la voiture, consommation énergétique la plus basse possible pour ne pas pomper les ressources électriques de la voiture, utilisation optimales des données massives des Tesla déjà sur les routes, etc. Les constructeurs traditionnels n’ont pas toutes ses contraintes spécifiques, ils ont plutôt des contraintes standard liées à la réglementation (normes ADAS pour l’Europe par exemple à partir de 2021). L’exemple de Général Motors est instructif car il a développé le système le plus avancé après celui de Tesla, Super Cruise:
Super Cruise est un système de conduite autonome (ADAS) sur autoroute. Il est fondé sur une carte HD propriétaire mise à jour fréquemment, alimentée par des données provenant de LIDAR montés sur des véhicules de patrouille. La puce est fabriquée par Mobileye, entraînée par les données de GM, les algorithmes sont propriétaires et travaillent les données fournies par des caméras et radars (moins chers que les LIDAR, donc commercialisables. L’originalité est d’avoir une caméra sur le volant qui surveille le comportement du conducteur et l’alerte en cas d’inattention. Ce dernier peut lâcher ses mains du volant en revanche.
GM a compris qu’il n’avait pas les effets d’échelle sur le hardware mais s’obstine sur le software (algorithmes, cartes), car il veut vendre une solution propriétaire qui différencie Cadillac. C’est à mon sens une erreur. La carte HD utilisée pour Super Cruise comme les algorithmes se concentrent sur l’autoroute, une niche sur laquelle GM espère être très bon. En attendant des acteurs se concentrent sur l’ADAS proprement dit, font une intégration réussie et passent des accords avec les constructeurs conscients du fait que la partie logicielle demande aussi un effet d’échelle. Le résultat est que Mobileye par exemple peut construire une carte HD globale en utilisant les données des constructeurs qui signent avec lui (l’union fait la force). Ses algorithmes traitent toutes les routes et l’apprentissage de la puce sera meilleur. GM sera vite dépassé sur le software et devra abandonner.
Les gagnants
Ce sont ceux qui arriveront à intégrer de la meilleure manière cartographie, données, capteurs, puces (SOC) et software. Le point central de l’intégration est la puce qui est l’élément le plus difficile à concevoir, en raison des contraintes physiques associées. Cela explique pourquoi les concepteurs intégrés de système de conduite autonomes sont tous des producteurs de puces à la base. Cela réduit singulièrement le nombre de gagnants potentiels: Nvdia, Nxp, Qualcomm, Mobileye et Tesla qui fabrique aussi la voiture. Le deuxième élément discriminant est la quantité de données. Le premier entrant, celui qui a pu passer le plus d’accord avec les constructeurs automobiles a la possibilité de construire une base de données des km parcourus sans précédents, en tout cas bien meilleure que chaque constructeur pris individuellement. Mobileye est le candidat possible à la médaille d’or: il est le premier entrant, fournit sa technologie à 70% des constructeurs et a passé des accords de collecte avec 6 d’entre eux dont Volkswagen, Nissan et BMW: il parcourt 6 millions de km réels tous les jours ! Mobileye, comme Tesla, a choisi de s’appuyer sur des caméras bon marchés, fabricant des LIDAR synthétiques logiciels par triangulation plutôt que d’utiliser des LIDAR physiques très chers. Mobileye est integré, a l’effet d’échelle et de réseau, il sera difficile à déplacer (Nvdia est en retard, Qualcomm encore plus n’ayant que la puce) jusqu’à ce que l’ADAS devienne une commodité. Ce n’est pas pour demain.
L’exemple de la voiture autonome est une très bonne illustration du pouvoir du feedback. La technologie ne peut rivaliser avec des solutions itératives. La voie à suivre n’est pas la perfection de niveau 5 (qui fait peur aux États) mais le bon compromis de niveau 2, qui bénéficie d’un fort vent arrière: la bénédiction des pouvoirs publics…et du consommateur. Les LIDAR de Waymo sont certainement géniaux, bien que très moches, la puissance déployée par Nvdia ou Qualcomm énorme mais ne vaut il pas mieux de bonnes vieilles caméras pas chères guidées par des algorithmes ingénieux, des puces parfaitement adaptées à la conduite et des données réelles récoltées sur les routes et non par simulation ? C’est peut être par cette voie plus modeste qu’on arrivera un jour à la voiture sans chauffeur.
Bonne fin de semaine,
Hervé